- Obniżka

Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Najniższa cena produktu 35,49 zł z dnia 19.04.2024
Najniższa cena w ciągu 30 dni przed aktualną promocją: 39,43 zł
Zapytaj o Sterownik silnika krokowego TB6600 0.5A-4.0A, 42VDC, krok/kierunek

Przed pierwszym uruchomieniem urządzenia, prosimy o uważne przeczytanie niniejszej instrukcji obsługi.
UWAGA!!! Każda maszyna jest potencjalnie niebezpieczna. Obrabiarki sterowane numerycznie mogą stwarzać większe zagrożenie od manualnych. Poruszające się elementy systemu narażają operatora na niebezpieczeństwo. Unikaj z nimi kontaktu oraz zachowaj bezpieczny odstęp kiedy podane jest napięcie zasilania. To użytkownik odpowiedzialny jest za finalną aplikację. Powinien On zadbać o to, aby maszyna była zrealizowana zgodnie z obowiązującymi normami i przepisami.
Moduły przeznaczone do zabudowy mogą być stosowane i obsługiwane tylko wtedy, gdy zostaną umieszczone w odpowiedniej osłonie. W miejscach, w których wystąpienie błędu w systemie automatyki może być przyczyną okaleczenia osób, uszkodzenia urządzeń lub spowodowania wysokich strat finansowych muszą być zastosowane dodatkowe środki ostrożności. Zagwarantują one bezpieczne działanie obrabiarki w przypadku wystąpienia uszkodzenia lub zakłócenia (np. niezależne wyłączniki krańcowe, blokady mechaniczne itd.). Producent oraz dystrybutorzy nie ponoszą odpowiedzialności za straty finansowe oraz doznane obrażenia wynikające z niewłaściwego i niezgodnego z przeznaczeniem eksploatowaniem urządzenia.
Sterownik TB6600 jest to sterownik 2- i 4-fazowych silników krokowych. Sterownik ten współpracuje z szeroką gamą silników od Nema 8 do Nema 24 i może być stosowany w wielu różnych maszynach, takich jak: moduły X-Y, etykieciarki, cięcie laserem, maszyny grawerujące oraz urządzenia typu podnieś - przenieś. Obsługuje on sterowanie krokiem i kierunkiem (step/dir). Wejście zezwolenia pracy (ENA) pozwala na wyłączenie prądu silnika. Użytkownik może ustawić mikrokrok oraz prąd z jakim będzie pracował silnik krokowy. Nastawy dokonujemy przy pomocy 6 torowego przełącznika typu DIP umieszczonego na sterowniku. Istnieje 7 rodzajów mikrokroków (1,2 / A, 2 / B, 4,8,16,32) i 8 rodzajów kontroli prądu (0.7A, 1.2A, 1.7A, 2.2A, 2.7A, 2.9A, 3.2A, 4A).Aby zapewnić odporność na zakłócenia, wszystkie wejścia sterujące wyposażone są w optoizolację. Szeroki zakres napięć zasilających 9-42 VDC, czyni go uniwersalnym w zastosowaniu i umożliwia adaptację w różny gotowych systemach sterowania.
Zalety sterownika TB6600:
Parametry elektryczne
| Parametr | Minimalne | Typowe | Maksymalne | Jednostka |
| Prąd wyjściowy | 0.7 | - | 4 | [A] Peak |
| Zasilanie (DC) | 9 | 24 | 42 | [V] DC |
| Prąd sygnałów logicznych | 7 | 10 | 16 | [mA] |
| Częstotliwość impulsów wej. | 0 | - | 200 | [kHz] |
Parametry eksploatacyjne
| Chłodzenie | Pasywne lub wymuszony obieg | ||
| Środowisko | Miejsce | Unikać kurzu, oleju i gazów powodujących korozję | |
| pracy | -10°C - 45°C | ||
| składowania | -20°C - 65°C | ||
| Wilgotność | Bez kondensacji | ||
| Drgania | 10-55 Hz, 0.15 mm/s | ||
Parametry mechaniczne
| Wymiary [mm] | Długość | 96 | |
| Szerokość | 28 | ||
| Wysokość | Bez wtyczek P1 i P2 | Z wtyczkami P1 i P2 | |
| 57 | 70 | ||
| Waga [kg] | 0.2 | ||

Piny złącza sygnałów sterujących P1
 |
Sygnał | Funkcja |
| PUL+ | Sygnał impulsowy: wejście sygnał kroku. Sterowanie 5V (TTL) Przy sterowaniu sygnałem o napięciu wyższym należy włączyć szeregowo rezystor ograniczający prąd transoptora (podobnie dla sygnałów DIR i ENA). | |
| PUL- | ||
| DIR+ | Sygnał kierunku: sygnał przyjmuje niski lub wysoki poziom, reprezentujący kierunek obrotów silnika. | |
| DIR- | ||
| ENA+ | Sygnał zezwolenia: sygnał używany do zezwolenia/zakazu pracy. Niepodłączone oznacza zezwolenie pracy dla sterownika. | |
| ENA- |
Piny złącza zasilającego P2
 |
Nr. pinu | Sygnał | Funkcja |
| 1,2 | Faza B | Cewka B silnika (przewody B+ i B-) | |
| 3,4 | Faza A | Cewka A silnika (przewody A+ i A-) | |
| 5 | GND | Masa zasilania DC | |
| 6 | +Vcc | Zasilanie DC, od +9 V do +42 V |
6-bitowy przełącznik DIP
 |
Nr przełącznika | Funkcja |
| 1,2,3 | Używane do ustawiania prądu pracy silnika | |
| 4,5,6 | Używane do ustawiania rozdzielczośći |
Diody sygnalizują stan pracy sterownika. Zielony LED oznacza podanie zasilania i oczekiwanie TB6600 na sygnały kierunku (DIR) i kroku (PUL). Czerwony LED oznacza wystąpienie błędu (awarii lub zadziałania któregoś z zabezpieczeń).
W sterowniku TB6600, aby zwiększyć odporność na zakłócenia oraz elastyczność interfejsu, zastosowano wejścia różnicowe. Pojedyncze impulsy z urządzenia sterującego, także są akceptowane. Obwód wejściowy posiada wbudowaną szybką. Zalecane jest stosowanie rezystorów podciągających w celu uzyskania większej stromości impulsów sterujących. Sterownik akceptuje sterowanie tzw. wspólnym plusem (wspólna anoda) oraz wspólnym minusem ( wspólna katoda). Poniższe schematy przedstawiają sposoby podłączenia sygnałów sterujących:

A, B, C – optoizolatory wbudowane w sterowniku TB6600,
RA, RB, RC – (~300Ω) rezystory ograniczające prąd diody wbudowane w sterowniku TB6600
RP – Opcjonalne rezystory podciągające (dla 5V RP=4,7kΩ, dla 12V RP=10kΩ, dla 24V RP=22kΩ),
T1, T2, T3 – tranzystory w kontrolerze sterującym/komputerze,
R01, R02, R03 – dodatkowe rezystory ograniczające prąd diody.
Wartości dodatkowych rezystorów ograniczających prąd diody transoptora w zależności od napięcia VCC (sterującego).
| VCC [V] | R0 [kΩ] |
| 5 | 1 |
| 12 | 1 |
| 24 | 2,2 |
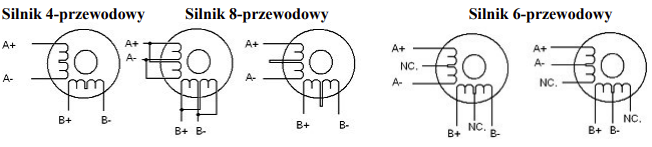
Sterownik TB6600 może sterować krokowymi silnikami hybrydowymi z 4, 6 lub 8 wyprowadzeniami. Poniższy diagram pokazuje podłączenia do silników w różnej konfiguracji.
Po podłączeniu sygnałów sterujących, uzwojeń silnika oraz zasilania przed pierwszym uruchomieniem całego systemu należy poprawnie skonfigurować nastawy sterownika. Wybór wartości prądu podawanego na motory i podział kroku odbywa się za pomocą 6 mikro włączników umieszczonych na obudowie sterownika TB6600.
Pierwsze trzy przełączniki (SW 1,2 i 3 ) służą do ustawienia podziału kroku, który możemy wybrać zgodnie z poniższą tabelą ( taka sama tabela jest nadrukowana na sterowniku):
| μkrok | μkroków/obrót ( dla silnika 1,8º) |
SW1 | SW2 | SW3 |
| NC | NC | ON | ON | ON |
| 1 | 200 | ON | ON | OFF |
| 2/A | 400 | ON | OFF | ON |
| 2/B | 400 | OFF | ON | ON |
| 4 | 800 | ON | OFF | OFF |
| 8 | 1600 | 3OFF | ON | OFF |
| 16 | 3200 | OFF | OFF | ON |
| 32 | 6400 | OFF | OFF | OFF |
Trzy ostatnie bity (SW4,5 i 6) przełącznika DIP używane są do ustawienia prądu pracy silnika. Należy wybrać ustawienia najbardziej zbliżone do prądu wymaganego przez silnik według tabeli podanej poniżej:
| Prąd szczytowy | RMS | SW4 | SW5 | SW6 |
| 0.7A | 0.5A | ON | ON | ON |
| 1.2A | 1 A | ON | OFF | ON |
| 1.7A | 1.5A | ON | ON | OFF |
| 2.2A | 2A | ON | OFF | OFF |
| 2.7A | 2.5A | OFF | ON | ON |
| 2.9A | 2.8A | OFF | OFF | ON |
| 3.2A | 3A | OFF | ON | OFF |
| 4A | 3.5A | OFF | OFF | OFF |
W przypadku kiedy sterownik TB6600 nie pracuje poprawnie, pierwszym krokiem powinno być sprawdzenie czy problem jest natury elektrycznej czy mechanicznej. Ważne jest, aby dokumentować każdy krok przy rozwiązywaniu problemu. Być może będzie konieczność skorzystania z tej dokumentacji w późniejszym okresie, a szczegóły w niej zawarte w wielkim stopniu pomogą pracownikom naszego Wsparcia Technicznego rozwiązać zaistniały problem. Wiele błędów w systemie sterowania ruchem może być związanych zakłóceniami elektrycznymi, błędami oprogramowania urządzenia sterującego lub błędami w podłączeniu przewodów. Poniżej przedstawiono tabelę z najpopularniejszymi problemami, z którymi zgłaszają się klienci do naszego Wsparcia Technicznego.
| Objawy | Prawdopodobna przyczyna usterki | Postępowanie |
| Silnik nie pracuje | Brak zasilania sterownika | Wizualnie sprawdzamy świecenie się poszczególnych diod LED sygnalizujących obecność napięć na urządzeniu. W przypadku stwierdzenia braku jakiegoś napięcia należy odłączyć zasilanie szafy sterowniczej i sprawdzić działanie poszczególnych bezpieczników. Uszkodzone wymieniamy na nowe zgodne z aplikacją systemu. |
| Źle dobrana rozdzielczość | Wykonujemy korektę ustawień na przełączniku DIP | |
| Złe ustawienia prądu | Dokonujemy korektę na przełączniku DIP | |
| Aktywny błąd sterownika | Sprawdzamy wartość napięcia zasilania. Przy wyłączonym zasilaniu sprawdzamy podłączenia z silnikami (prawdopodobne zwarcie na wyjściu sterownika). Aktywne zabezpieczenie sterownika. | |
| Brak sygnału zezwolenia | Sprawdzamy konfigurację pinu wyjściowego Enable, możliwe, że trzeba będzie zmienić jego stan na przeciwny (Acive Low). Sprawdzamy poprawność połączeń z płytą główną lub sterownikiem PLC. | |
| Silnik kręci się w złym kierunku | Fazy silnika mogą być odwrotnie podłączone | Przy wyłączonym zasilaniu zamieniamy wyprowadzenia jednej fazy silnika lub zmieniamy kierunek w programie sterującym. |
| Błąd sterownika | Złe ustawienia prądu | Dokonujemy korektę na przełączniku DIP |
| Zwarcie cewek silnika | Możliwe zwarcie na wyjściu sterownika, możliwe uszkodzenie silnika | |
| Przeciążenie na zasilaniu lub wyjściu sterownika | Sprawdzamy wartość napięcia zasilania. Przy wyłączonym zasilaniu sprawdzamy podłączenia z silnikami (prawdopodobne zwarcie na wyjściu sterownika). | |
| Przegrzanie sterownika | Sprawdzamy wartość zadaną prądu (może być zbyt duża). Sprawdzamy chłodzenie szafy. | |
| Nieregularny ruch silnika | Kable silnika nieekranowane | Do podłączeń silników należy stosować kable ekranowane, ekran należy uziemić. Sprawdzamy poprawność uziemienia. |
| Kable sterujące nieekranowane | Do połączeń sterowników z płytą główną, sterownikiem PLC należy stosować kable ekranowane, ekran należy uziemić. Sprawdzamy poprawność uziemienia. | |
| Kable sterujące za blisko kabli silników | Sprawdzamy odległość między kablami sterującymi a zasilającymi silniki. | |
| Złe uziemienie w systemie | Sprawdzamy poprawność uziemienia. | |
| Przerwane uzwojenie silnika | Przy wyłączonym zasilaniu sprawdzamy poprawność połączeń silnik ze sterownikiem. Sprawdzamy rezystancję uzwojeń. W razie potrzeby wymieniamy silnik na inny. | |
| Złe podłączenie faz silnika | Przy wyłączonym zasilaniu sprawdzamy podłączenia silnika. Jeżeli zaobserwujemy nieprawidłowość, korygujemy | |
| Złe ustawienia prądu | Dokonujemy korektę na przełączniku DIP | |
| Opóźnienia podczas przyśpieszania silnika | Za słaby silnik do aplikacji | Wymieniamy silnik na inny, mocniejszy. |
| Zbyt wysokie ustawienia przyśpieszania | Wykonujemy korektę ustawień podziału na przełączniku DIP. Korygujemy nastawy wykonane w programie Mach3 podczas dostrajania siników. | |
| Zbyt niskie napięcie zasilania | Sprawdzamy wartość napięcia zasilania stopni końcowych. | |
| Nadmierne grzanie się silnika i sterownika | Zbyt słabe odprowadzenie ciepła | Sprawdzamy drożność filtrów wentylacyjnych w szafie sterowniczej i poprawność działania wentylatora. Kontrolujemy stopień zapylenia sterownika. |
| Nieużywana redukcja prądu | Sprawdzamy ustawienia funkcji redukcji prądu. Wykonujemy korektę na przełączniku DIP | |
| Zbyt wysokie ustawienie prądu | Wykonujemy korektę na przełączniku DIP |
Personel zajmujący się instalacją musi posiadać elementarną wiedzę w zakresie obchodzenia się z urządzeniami elektrycznymi. Gdy nie czujesz się na siłach montaż należy zlecić osobie, która ma doświadczenie.
Nasza firma wykonuje na zamówienie Uniwersalne Sterowniki Numeryczne (USN) na bazie sterowników TB6600 i innych, o dowolnej ilości osi. Sterowniki są kompletne i gotowe do podłączenia, zamknięte w obudowy, posiadają wyłącznik awaryjnego zatrzymania. Każdy sterownik wykonujemy indywidualnie, według wymagań klienta. USN-y współpracują z programami generującymi sygnały za pośrednictwem portu LPT np. Mach3/Mach4, Step2CNC i wielu innych. Możemy również wykonać sterowniki komunikujące się z komputerem za pomocą portu USB oraz Ethernet, lub oparte o sterownik PLC.