- 9.2A, 230VAC, krok/kierunek")
Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Zapytaj o Sterownik silnika krokowego SSK-B17 (3H2080)- 9.2A, 230VAC, krok/kierunek

Sterownik silnika krokowego SSK-B17 (3H2080) to ekonomiczny, wysokowydajny napęd mikro-krokowy wykorzystujący technikę sterowania czysto sinusoidalnym prądem. Odpowiedni do 3-fazowych, 3- i 6-odprowadzeniowych silników krokowych. Dzięki zaawansowanemu sterowaniu, sterowany silnik generuje niski poziom hałasu oraz wydziela mało ciepła. Ogólna technologia sterowania prądem pseudo sinusoidalnym zastosowana w większości przemienników generowała zniekształconą falę sinusoidalną i tętnienia prądu, co skutkowało wibracjami, hałasem i nagrzewaniem silnika. Powoduje to degradację silnika w czasie, zmniejszenie jego wydajności i skrócenie żywotności.
Sterownik SSK-B17 posiada funkcję automatycznej redukcji prądu podczas postoju. Gdy ją włączymy nastąpi zmniejszenie prądu o 50%, gdy sterownik wykryje postój silnika. Sterownik posiada optycznie izolowane, różnicowe wejścia TTL dla wszystkich wejść – kroku, kierunku oraz zezwolenia na pracę ( PLS, DIR oraz ENA). W sterowniku zastosowano zabezpieczenie przed przepięciem oraz zwarciem cewka do cewki i cewka do uziemienia.
Ustawienie prądu oraz rozdzielczości sterownika
Po podłączeniu silnika oraz obwodu zasilania do sterownika, przed jego pierwszym uruchomieniem, wymaga on konfiguracji. Będzie ona obejmowała ustawienie prądu wyjściowego oraz rozdzielczości pracy ( tzw. mikrokrok, lub podział). Wybór wartości prądu podawanego na motory i podział kroku odbywa się za pomocą 8 mikrowłącznikow umieszczonych na przednim panelu obudowy drivera.
Pierwsze trzy bity (SW 1, 2 i 3) przełącznika DIP używane są do ustawienia prądu podczas pracy silnika (tzw. prąd dynamiczny). Należy wybrać ustawienia najbardziej zbliżone do prądu wymaganego przez silnik według tabeli podanej poniżej:
Przełącznik SW4 wykorzystywany jest do ustawiania prądu trzymającego. OFF oznacza, prąd trzymania zostanie ograniczony o połowę wybranej wartości prądu dynamicznego. ON oznacza, że prąd trzymania będzie taki sam jak wybrana wartość prądu dynamicznego. Sterownik, po upływie 1 sekundy od ostatniego sygnału kroku, automatycznie obniża do 50 % wybranej wartości prądu dynamicznego. W ten sposób zmniejsza się do 40% nagrzewanie silnika i sterownika – ogólnie straty energii podczas postoju są ograniczone. Funkcję redukcji prądu należy stosować zależnie od potrzeb.
| Parametr | Minimalne | Typowe | Maksymalne | Jednostka |
|---|---|---|---|---|
| Prąd wyjściowy | 2.4 | - | 9.2 | [A] Peak |
| Zasilanie (AC) | 80 | 110 | 230 | [V] AC |
| Częstotliwość impulsów wej. | 0 | - | 200 | [kHz] |
| Chłodzenie | Pasywne lub wymuszony obieg | ||
|---|---|---|---|
Środowisko |
Miejsce | Unikać kurzu, oleju i gazów powodujących korozję | |
Temperatura |
otoczenia | 0°C - 50°C | |
| pracy | 65°C Max | ||
| składowania | -10°C - 80°C | ||
| Wilgotność | 40% - 80% RH | ||
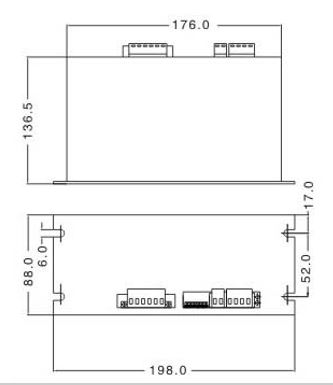
Wymiary [mm] |
Długość | 198 |
| Szerokość | 88 | |
| Wysokość |
150 (ze złączami śrubowymi) |
|
| Waga [kg] | ~ 1.75 |
|
| Sygnał | Funkcja |
| PLS+ |
Wejście impulsowe dla sygnału kroku: Sygnał różnicowy TTL z impulsem o wysokiej częstotliwości, szerokości min. 1 μs. |
| PLS- | |
| DIR+ |
Sygnał kierunku: Sygnał przyjmuje niski lub wysoki poziom, reprezentujące kierunek obrotów silnika. Dla poprawnego działania sygnał kierunkowy powinien być przesłany do sterownika 5μs przed pierwszym impulsem kroku. |
| DIR+ | |
| ENA+ |
Sygnał zezwolenia na pracę: Sygnał używany do zezwolenia/zakazu pracy. Niepodłączone oznacza zezwolenie pracy dla sterownika (gdy silnik trzyma moment oraz reaguje na sygnały sterujące). |
| ENA- |
| Sygnał | Funkcja |
| PG | Uziemienie |
|
AC1
|
Napięcie zasilania: 80-230VAC, 50Hz |
|
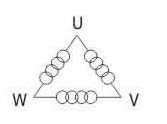
U V W |
Zaciski podłączenia silnika krokowego.
|
| Nr przełącznika | Funkcja |
|---|---|
| 1, 2, 3 | Używane do ustawiania prądu podczas pracy silnika (prąd dynamiczny). |
| 4 |
Używany do ustawienia wartości prądu postojowego. OFF oznacza, że prąd trzymający jest ustawiony na połowe prądu dynamicznego. ON oznacza, że prąd trzymający będzie miał tą samą wartość co prąd dynamiczny. |
| 5, 6, 7, 8 | Używane do ustawiania rozdzielczości |
Diody sygnalizują stan pracy sterownika. Zielona LED oznacza podanie sygnału zezwolenia (ENA) i oczekiwanie SSK-B17 na sygnały kierunku (DIR) i kroku (PLS). Czerwona LED oznacza wystąpienie błędu (awarii). Spowodowane to może być zadziałaniem, któregoś z zabezpieczeń, zbyt dużym napięciem, zwarciem lub uszkodzeniem układu.
Kompletny system sterowania silnikiem krokowym powinien zawierać silnik krokowy, zasilanie i kontroler, który będzie wysyłał odpowiednie sygnały sterujące tak, aby realizować zadany algorytm pracy silnika (generator impulsów, komputer z programem sterującym lub sterownik PLC).
Sterownik może być zasilany bezpośrednio z sieci 230VAC, jednak dla zwiększenia bezpieczeństwa operatora jak i samego sterownika zalecane jest użycie transformatora obniżającego napięcie. Świetnie tutaj się sprawdzi transformator TR1000 230/180. Do takiej mocy transformatora zalecane jest użycie układu Soft Start. Transformator zapewni separację galwaniczną od wysokiego napięcia co zabezpieczy operatora oraz obniży napięcie zasilania dla sterownika, co zapewni margines bezpieczeństwa na skoki napięcia sieci zasilającej.
W sterowniku SSK-B17, aby zwiększyć odporność na zakłócenia oraz elastyczność jego zastosowania, zastosowano wejścia różnicowe. Sterownie pojedynczym sygnałem ( np. typu OC) z urządzenia sterującego, także jest akceptowane. Obwód wejściowy posiada wbudowaną szybką optoizolację. Zalecane jest stosowanie rezystorów podciągających w celu uzyskania większej stromości impulsów sterujących ( zależnie od jakości sygnałów układu sterującego).
Poniższe schematy przedstawiają sposoby podłączenia sygnałów sterujących:
Wspólna anoda
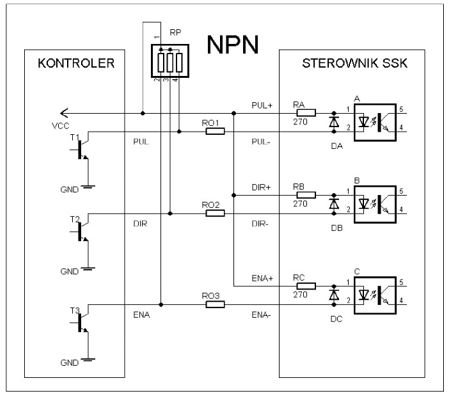
Wspólna katoda
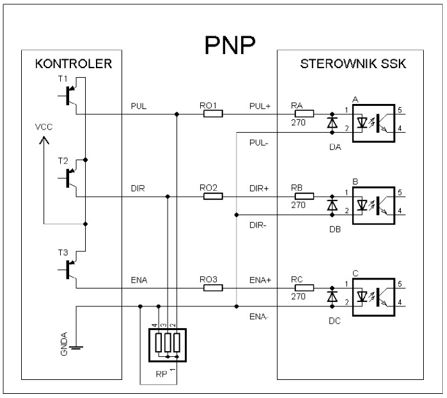
Opis do schematów na poprzedniej stronie
A, B, C – optoizolatory wbudowane w sterowniku SSK-B17,
DA, DB, DC – diody zabezpieczające wbudowane w sterowniku SSK-B17,
RA, RB, RC – (270Ω) rezystory ograniczające prąd diody wbudowane w sterowniku SSK-B17,
RP – rezystory podciągające, zalecane, (dla 5V RP=4,7kΩ, dla 12V RP=10kΩ, dla 24V RP=22kΩ),
T1, T2, T3 – tranzystory w kontrolerze, komputerze,
R01, R02, R03 – dodatkowe rezystory ograniczające prąd diody wymagane są przy napięciu sygnałów sterujących ( PLS, DIR, ENA) powyżej 5VDC.
Wartości dodatkowych rezystorów ograniczających prąd diody transoptora w zależności od napięcia sterującego:
| VCC [V] | R0[kΩ] |
|---|---|
| 5 | 0 |
| 12 | 1 |
| 24 | 2.2 |
Ustawienie prądu oraz rozdzielczości sterownika
Po podłączeniu silnika oraz obwodu zasilania do sterownika, przed jego pierwszym uruchomieniem, wymaga on konfiguracji. Będzie ona obejmowała ustawienie prądu wyjściowego oraz rozdzielczości pracy ( tzw. mikrokrok, lub podział). Wybór wartości prądu podawanego na motory i podział kroku odbywa się za pomocą 8 mikrowłącznikow umieszczonych na przednim panelu obudowy drivera.
Pierwsze trzy bity (SW 1, 2 i 3) przełącznika DIP używane są do ustawienia prądu podczas pracy silnika (tzw. prąd dynamiczny). Należy wybrać ustawienia najbardziej zbliżone do prądu wymaganego przez silnik według tabeli podanej poniżej:
|
Wartość prądu PEAK (A) | SW1 | SW2 | SW3 |
|---|---|---|---|
| 2.4 | OFF | OFF | OFF |
| 3.3 | ON | OFF | OFF |
| 4.3 | OFF | ON | OFF |
| 5.3 | ON | ON | OFF |
| 6.3 | OFF | OFF | ON |
| 7.3 | ON | OFF | ON |
| 8.3 | OFF | ON | ON |
| 9.2 | ON | ON | ON |
Przełącznik SW4 wykorzystywany jest do ustawiania prądu trzymającego. OFF oznacza, prąd trzymania zostanie ograniczony o połowę wybranej wartości prądu dynamicznego. ON oznacza, że prąd trzymania będzie taki sam jak wybrana wartość prądu dynamicznego. Sterownik, po upływie 1 sekundy od ostatniego sygnału kroku, automatycznie obniża do 50 % wybranej wartości prądu dynamicznego. W ten sposób zmniejsza się do 40% nagrzewanie silnika i sterownika – ogólnie straty energii podczas postoju są ograniczone. Funkcję redukcji prądu należy stosować zależnie od potrzeb.
Podział kroku ustawiany jest za pomocą przełączników SW 5, 6, 7 i 8 według poniższej tabeli:
| Kroków / Obrót | SW5 | SW6 | SW7 | SW8 |
|---|---|---|---|---|
| 200 | OFF | OFF | OFF | OFF |
| 400 | ON | OFF | OFF | OFF |
| 500 | OFF | ON | OFF | OFF |
| 800 | ON | ON | OFF | OFF |
| 1000 | OFF | OFF | ON | OFF |
| 1250 | ON | OFF | ON | OFF |
| 1600 | OFF | ON | ON | OFF |
| 2000 | ON | ON | ON | OFF |
| 2500 | OFF | OFF | OFF | ON |
| 3200 | ON | OFF | OFF | ON |
| 4000 | OFF | ON | OFF | ON |
| 5000 | ON | ON | OFF | ON |
| 6400 | OFF | OFF | ON | ON |
| 8000 | ON | OFF | ON | ON |
| 10000 | OFF | ON | ON | ON |
| 12800 | ON | ON | ON | ON |
W przypadku kiedy sterownik SSK-B17 nie pracuje poprawnie, pierwszym krokiem powinno być sprawdzenie czy problem jest natury elektrycznej czy mechanicznej. Ważne jest, aby dokumentować każdy krok przy rozwiązywaniu problemu. Być może będzie konieczność skorzystania z tej dokumentacji w późniejszym okresie, a szczegóły w niej zawarte w wielkim stopniu pomogą pracownikom naszego Wsparcia Technicznego rozwiązać zaistniały problem. Wiele błędów w systemie sterowania ruchem może być związanych zakłóceniami elektrycznymi, błędami oprogramowania urządzenia sterującego lub błędami w podłączeniu przewodów. Poniżej przedstawiono tabelę z najpopularniejszymi problemami, z którymi zgłaszają się klienci do naszego Wsparcia Technicznego.
| Objawy | Prawdopodobna przyczyna usterki | Postepowanie |
|---|---|---|
Silnik nie pracuje |
Brak zasilania sterownika | Wizualnie sprawdzamy świecenie się poszczególnych diod LED sygnalizujących obecność napięć na urządzeniu. W przypadku stwierdzenia braku jakiegoś napięcia należy odłączyć zasilanie szafy sterowniczej i sprawdzić działanie poszczególnych bezpieczników. Uszkodzone wymieniamy na nowe zgodne z aplikacją systemu |
| Źle dobrana rozdzielczość | Wykonujemy korektę ustawień na przełączniku DIP | |
| Złe ustawienie prądu | Dokonujemy korekty na przełączniku DIP | |
| Aktywny błąd sterownika | Sprawdzamy wartość napięcia zasilania. Przy wyłączonym zasilaniu sprawdzamy podłączenia z silnikami ( prawdopodobne zwarcie na wyjściu sterownika). Aktywne zabezpieczenie sterownika. | |
| Brak sygnału zezwolenia |
Sprawdzamy konfigurację pinu wyjściowego Enable, możliwe, że trzeba będzie zmienić jego stan na przeciwny (Active Low). Sprawdzamy poprawność połączeń z płytą główną lub sterownikiem PLC. |
|
| Silnik kręci się w złym kierunku | Fazy silnika mogą być odwrotnie podłączone | Przy wyłączonym zasilaniu zamieniamy wyprowadzenia jednej fazy silnika lub zmieniamy kierunek w programie sterującym. |
Błąd sterownika |
Złe ustawienie prądu | Dokonujemy korekty na przełączniku DIP |
| Zwarcie cewek silnika | Możliwe zwarcie na wyjściu sterownika, możliwe uszkodzenie silnika | |
| Przeciążenie na zasilaniu lub wyjściu sterownika | Sprawdzamy wartość napięcia zasilania. Przy wyłączonym zasilaniu sprawdzamy podłączenie z silnikami(prawdopodobne zwarcie na wyjściu sterownika) | |
| Przegrzanie sterownika | Sprawdzamy wartość zadaną prądu (może być zbyt duża). Sprawdzamy chłodzenie szafy. | |
| Nieregularny ruch silnika | Kable silnika nieekranowane | Do połączenia silników należy stosować kable ekranowane, ekran należy uziemić. Sprawdzamy poprawność uziemienia. |
| Kable sterujące nieekranowane | Do połączeń sterowników z płytą główną, sterownikiem PLC należy stosować kable ekranowane, ekran należy uziemić. Sprawdzamy poprawność uziemienia. | |
| Kable sterujące za blisko kabli silników | Sprawdzamy odległość między kablami sterującymi a zasilającymi silniki. | |
| Złe uziemienie w systemie | Sprawdzamy poprawność uziemienia. | |
| Przerwane uzwojenie silnika | Przy wyłączonym zasilaniu sprawdzamy poprawność połączeń silnik, ze sterownikiem. Sprawdzamy poprawność uziemienia. | |
| Złe podłączenie faz silnika | Przy wyłączonym zasilaniu sprawdzamy podłączenia silnika. Jeżeli zaobserwujemy nieprawidłowość, korygujemy. | |
| Złe ustawienie prądu | Dokonujemy korekty na przełączniku DIP | |
| Opóźnienie podczas przyśpieszania silnika | Za słaby silnik do aplikacji | Wymieniamy silnik na inny, mocniejszy. |
| Zbyt wysokie ustawienia przyśpieszania | Wykonujemy korektę ustawień podziału na przełączniku DIP. Korygujemy nastawy wykonane w programie Mach3 podczas dostrajania silników. | |
| Zbyt niskie napięcie zasilania | Sprawdzamy wartość napięcia zasilania stopni końcowych. | |
| Nadmierne grzanie się silnika i sterownika | Zbyt słabe odprowadzanie ciepła | Sprawdzamy drożność filtrów wentylacyjnych w szafie sterowniczej i poprawność działania wentylatora. Kontrolujemy stopień zapylenia sterownika. |
| Nieużywana redukcja prądu | Sprawdzamy ustawienia funkcji redukcji prądu. Wykonujemy korektę na przełączniku DIP | |
| Zbyt wysokie ustawienie prądu | Wykonujemy korektę na przełączniku DIP |
Sterownik wymaga do zasilania niebezpiecznego dla zdrowia i życia napięcia 230VAC. Dlatego personel zajmujący się instalacją musi posiadać elementarną wiedzę w zakresie obchodzenia się z urządzeniami elektrycznymi. Gdy nie czujesz się na siłach, instalację należy powierzyć osobie z odpowiednimi uprawnieniami.
Sterownik powinien zostać zamontowany tak, aby uniemożliwić wnikanie do jego obudowy kurzu lub innych odpadów powstających podczas obróbki. Należy zapewnić odpowiednie chłodzenie sterownika ( obudowa w której będzie zamknięty powinna zapewnić przynajmniej grawitacyjny przepływ powietrza).
- 9.2A, 230VAC, krok/kierunek")
- 9.2A, 230VAC, krok/kierunek")
- 9.2A, 230VAC, krok/kierunek")
- 9.2A, 230VAC, krok/kierunek")




- 9.2A, 230VAC, krok/kierunek")



 - 4.2A, 50VDC, krok/kierunek, Leadshine")





