- Obniżka

Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Najniższa cena produktu 622,00 zł z dnia 25.04.2024
Najniższa cena w ciągu 30 dni przed aktualną promocją: 691,11 zł

Sterownik SSK-B13 jest ekonomicznym, wysokowydajnym sterownikiem mikrokrokowym bazującym na najnowszych osiągnięciach technicznych. Jest dostosowany do sterowania 2-fazowymi i 4-fazowymi hybrydowymi silnikami krokowymi.
Używając zaawansowanej techniki bipolarnej stało-prądowej, pozwala uzyskać większą prędkość i moc z tego samego silnika porównując z tradycyjnymi technikami jakich używają np. sterowniki L/R. SSK-B13 współpracuje z szeroką gamą silników od Nema 14 do Nema 34 i może być stosowany w wielu różnych maszynach, takich jak: moduły X-Y, etykieciarki, cięcie laserem, maszyny grawerujące oraz urządzenia typu podnieś - przenieś. Wbudowane potencjometry służą do ustawiania prędkości, przyspieszania i hamowania silnika. Jego dodatkową zaletą jest wbudowany generator i możliwość ustalania prędkości za pomocą potencjometru lub analogowego napięcia 0-5V. Do podłączenia potencjometru może posłużyć wyprowadzone na zewnątrz sterownika napięcie +5V. Szczególnie użyteczny w aplikacjach z małymi wibracjami oraz tam gdzie wymagane są wysokie prędkości i precyzja.
Szeroki zakres napięć zasilających 18 - 80 VDC, czyni go uniwersalnym w zastosowaniu i umożliwia adaptację w różny gotowych systemach sterowania.
Nasza firma wykonuje na zamówienie uniwersalne sterowniki numeryczne (USN) na bazie SSK-B13 i dowolną ilość osi. Sterowniki są kompletne i gotowe do podłączenia, zamknięte w obudowy posiadają wyłącznik awaryjnego zatrzymania. Każdy sterownik wykonujemy indywidualnie według wymagań klienta. USN-y współpracują z programami generującymi sygnały za pośrednictwem portu LPT np. Mach2/Mach3, KCam, Master5, TurboCNC, Step2CNC i wielu innych.
| Parametr | Minimalne | Typowe | Maksymalne | Jednostka |
|---|---|---|---|---|
| Prąd wyjściowy | 0,5 | - | 7 | [A] Peak |
| Zasilanie (DC) | 18 | 60 | 80 | [V] DC |
| Prąd sygnałów logicznych | 7 | 10 | 16 | [mA] |
| Częstotliwość impulsów wej. | 0 | - | 200 | [kHz] |
| Rezystancja izolacji | 500 | [MΩ] |
| Charakterystyka | Dead Band (strefa martwa) | Rozdzielczość | Min | Max | ||
|---|---|---|---|---|---|---|
| Wejście analogowe |
0-5V z urządzenia sterującego | 0-5V | 10mV | 10mV | 0 obr/s | 25 + 0,5 obr/s |
| Zewnętrzny potencjometr |
20mV | |||||
| Rampa przyspieszeń | 0 - 25 obr | 10mV | 10mV | 0,5 obr/s² | 250 + 1 obr/s² |
|
| Min prędkość (pot)* | 0 - 25 obr | 10mV | 10mV | 0 obr/s | 5 + 0,01 obr/s |
|
| Max prędkość (pot)* | 0 - 25 obr | 10mV | 10mV | 0 obr/s | 25 + 0,5 obr/s |
|
*ustawiane potencjometrem
| Chłodzenie | Pasywne lub wymuszony obieg | ||
| Środowisko | Miejsce | Unikać kurzu, oleju i gazów powodujących korozję | |
| Temperatura | otoczenia | 0°C - 50°C | |
| pracy | 70°C Max | ||
| składowania | -20°C - 65°C | ||
| Wilgotność | 40% - 90% RH | ||
| Drgania | 5,9 m/s² Max | ||
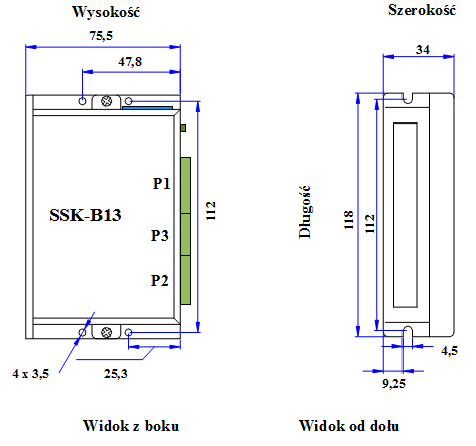
| Wymiary [mm] | Długość | 118 | |
| Szerokość | 34 | ||
| Wysokość | Bez wtyczek P1 i P2 | Z wtyczkami P1 i P2 | |
| 75,5 | 84,5 | ||
| Waga [kg] | ~ 0,350 | ||
Wymiary z tabeli zaznaczono na rysunku poniżej:




















 5.2A, 68VDC, krok/kierunek, Leadshine")



 8.2A, 200VAC, RS232, Leadshine")




