- Obniżka

Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Zdjęcia poglądowe, mogą różnic się od stanu rzeczywistego.
Sterowniki serii DG2S przeznaczone są do sterowania pracą szczotkowych silników prądu stałego (komutatorowego, silnika prądu stałego, tzw. Brush DC permanent magnet motor). Dostępne są sterowniki: DG2S 8020 ( maksymalne napięcie pracy 80V, prąd do 20A), Do w/w sterowników wymagana jest płytka programatora ( w celu zaprogramowania regulatora PID), oraz opcjonalnie moduł hamujący. W...
Najniższa cena produktu 486,66 zł z dnia 24.04.2024
Sterowniki serii DG2S przeznaczone są do sterowania pracą szczotkowych silników prądu stałego (komutatorowego. silnika prądu stałego. tzw. Brush DC permanent magnet motor). Dostępne są sterowniki: DG2S 8020 ( maksymalne napięcie pracy 80V. prąd do 20A).
Do w/w sterowników wymagana jest płytka programatora ( w celu zaprogramowania regulatora PID). oraz opcjonalnie moduł hamujący. W poszczególnych instrukcjach wyjaśniono przeznaczenie poszczególnych złącz. znaczenie diod LED. podano parametry elektryczne i mechaniczne. Aby zapewnić sprzężenie zwrotne. potrzebny jest enkoder inkrementalny z kanałami A i B. Sygnały sterujące są to sygnału kroku i kierunku (Step/Dir).
Sterowniki serii DG2S mogą współpracować z dowolnym oprogramowaniem realizującym tego typu sterowanie. np. popularny program Mach3.
| Parametry | Min | Typ | Max | Jedn. | Uwagi |
|---|---|---|---|---|---|
| Napięcie zasilania (model 08020) | 12 | - | 80 | VDC | Optymalne: U+znam+10...20% |
| 0 | - | 20 | A | Możliwość ustawienia ograniczenia maksymalnie 20A | |
| Prąd silnika | 0 | - | 35 | A | Możliwość ustawienia ograniczenia maksymalnie 35A |
| Napięcie zasilania logiki | 11.5 | 12 | 14 | VDC | |
| Prąd pobierany przez logikę | 100 | 200 | 250 | mA | |
| Zakres temperatur | 0 | 65 | °C | Auto wył. sterownika. gdy > 65 °C | |
| Napięcie pracy optoizolowanego wejścia | 3 | - | - | VDC | Gdy nap. > 5VDC. należy w szeregu dołączyć rezystor: dla 12V użyć 1kOhm dla 24V użyć 2.2kOhm |
| Prąd optoizolowanych wejść | 3 | 5 | 10 | mA | |
| Częstotliwość wejściowa | 0 | 400 | kHz | ||
| Maks. częstotl. impulsów enkodera | 1 | 1 | 1 | MHz | Przy logice x4 |
| Prąd wyjścia Error | 10 | 10 | 20 | mA | Ciągły prąd 20mAa zabroniony |
| Częstotliwość przełączania | 20 | 20 | 20 | kHz | |
| Czas próbkowania pętli PID | 1 | 65535 | *60 usec | Ustawianie co 60usec | |
| Minimalna rezystancja uzwojeń silnika | 0.4 | - | - | Ohm | Może być wymagane wtrącenie dodatkowej rezystancji w szereg z uzwojeniem silnika. |
| Minimalna indukcyjność uzwojeń silnika | 200 | - | - | uH | Może być wymagane wtrącenie dodatkowej indukcyjności w szereg z uzwojeniem silnika. |
 Zasilanie. oraz sam silnik możemy podłączyć do sterownika przy pomocy złączy śrubowych o średnicy M4. Silnik należy podłączyć do złącz oznaczonych jako Motor Arm1. oraz Motor Arm2. Przy pierwszym podłączeniu nie jest konieczna znajomość polaryzacji wyprowadzeń silnika. Zostanie to określone na etapie uruchamiania. oraz konfiguracji sterownika. Napięcie zasilania sterownika należy podłączyć do zacisków Power+. oraz Power-.
Zasilanie. oraz sam silnik możemy podłączyć do sterownika przy pomocy złączy śrubowych o średnicy M4. Silnik należy podłączyć do złącz oznaczonych jako Motor Arm1. oraz Motor Arm2. Przy pierwszym podłączeniu nie jest konieczna znajomość polaryzacji wyprowadzeń silnika. Zostanie to określone na etapie uruchamiania. oraz konfiguracji sterownika. Napięcie zasilania sterownika należy podłączyć do zacisków Power+. oraz Power-.Złącze Main jest standardowym złączem RJ45 używanym w informatyce. Przeznaczenie poszczególnych pinów jest następujące:
 1. Sygnał Step (krok) (wejście)
1. Sygnał Step (krok) (wejście)
2. Sygnał Direction (kierunek) (wejście)
3. Masa dla powyższych sygnałów kroku i kierunku (odseparowana od napięcia zasilnia)
4. Nie używane
5. Reset (wejście). oraz Stop (wejście)(wejście)
6. Error (wyjście). oraz Stop
7. DC Power + - plus napięcia zasilania logiki
8. DC Power - - GND napięcia zasilania logiki
Napięcie zasilania DC Power powinno być stabilizowane. o wartości podanej w tabeli z parametrami sterownika. Wejścia kroku i kierunku są optoizolowane (10Mbit/sec). Układ wejściowy wyposażony jest w filtry analogowe. oraz cyfrowe ograniczające wpływ zakłóceń na pracę sterownika. Linia Reset (oraz Stop). Sygnał jest odniesiony do masy napięcia zasilania logiki ( pin8). Aktywnym stanem tego wejścia jest stan niski- "activ low". co oznacza. że sterownik utrzymuje na tym zacisku normalnie stan wysoki. a zatrzymanie pracy następuje w momencie zwarcia tego zacisku do masy. Wejście to ma podwójne przeznaczenie.
W momencie. gdy powróci stan wysoki na tym wejściu aktywowany jest reset sterownika. Uwaga: Zresetowanie sterownika może być również wykonane przez zabranie. oraz ponowne podanie napięcia zasilania logiki. Aby wznowić pracę musimy usunąć przyczynę błędu. Musimy zwrócić również uwagę na poprawne podłączenie enkodera. aby sterownik mógł pracować poprawnie.
Linia Error (wyjście). oraz Stop (wejście) - proszę zapoznać się z rozdziałami 4.1.. gdzie opisano jej przeznaczenie. oraz z rozdziałem 5.5.. gdzie opisano sposóby wykorzystania tej linii.
Uwaga!!! Zatrzymanie pracy sterownika może być wykonane przez wejście Reset. oraz Error. Wymuszenie stanu niskiego na obu tych wejściach spowoduje zatrzymanie pracy. jednak z różnymi skutkami. Więcej szczegółów w kolejnych rozdziałach.
Sterownik serii DG2S współpracuje wyłącznie z enkoderami inkrementalnymi. o przebiegu prostokątnym TTL. Enkodery absolutne nie są obsługiwane. Jako złącze do podłączenia enkodera zostało zastosowane standardowe gniazdo RJ45. którego piny mają następujące przeznaczenie:

Przy pomocy 4-pinowego złącza USB-B sterownika DG2S możemy przeprowadzić strojenie . oraz dokonać jego diagnostyki. Do złącza należy podłączyć płytkę programatora ( sprzedawana oddzielnie). która to umożliwi nam podłączenie sterownika do portu USB komputera PC.
Więcej informacji można znaleźć w instrukcji obsługi programatora. Połączenie programatora z komputerem możemy dokonać przy pomocy standardowego kabla USB A-B (. który nie znajduje się w zestawie). Konfigurację. oraz diagnostykę możemy przeprowadzić przy pomocy programu Servoconfigurator3. który to możemy pobrać ze nasze strony. Zaleca się używanie najnowszej wersji oprogramowania.
Wewnątrz pobranych plików znajduje się opis obsługi programu. Plytka programatora- instrukcja obsługi i podłączenia Servoconfig3_R17
Dwie diody [czerwona i zielona] znajdujące się na płytce sterownika obrazują dla użytkownika stan pracy sterownika. W poniższym rozdziale opisano znaczenie poszczególnych stanów diod.
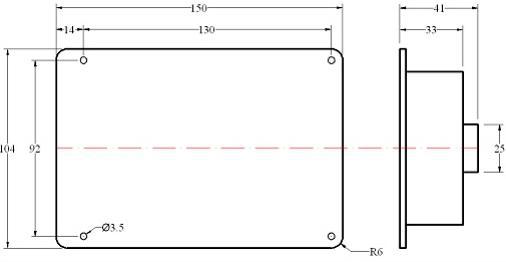
Wymiary podane są w mm. Obudowa sterownika ma 4 otwory montażowe o średnicy fi 3.5. Obudowa sterownika wykonana jest z aluminium. Stanowi ona radiator dla końcówek mocy sterownika. więc może ona się nagrzewać podczas pracy. Zaleca się montaż sterowników na powierzchni przewodzącej ciepło. która w większym stopniu umożliwi odprowadzenie ciepła.
Przy montażu zaleca użycie pasty silikonowej. która poprawi wymianę temperatury między obudową. a powierzchnią montażu. Sterownik ma wbudowane zabezpieczenie temperaturowe. Ale w celu uniknięcia przegrzania i nieprzewidzianych zatrzymań zaleca się zapewnienia odpowiedniej wymiany ciepła wewnątrz szafy sterowniczej.
Zaleca się użycie pary skręcanych przewodów w oplocie do podłączenia silnika. w celu minimalizacji zakłóceń EMI. W celu minimalizacji wpływu rezystancji połączeń zaleca się użycie przewodów o jak największej średnicy.
Enkoder należy podłączyć do gniazda Encoder sterownika DG2S. Podłączenie to można wykonać przy pomocy standardowego kabla Ethernet - dostępnego w większości sklepów komputerowych. Kupując kabel o odpowiedniej długości z zarobionymi obiema końcówkami. możemy go przeciąć i w ten sposób przy pomocy jednego odcinka kabla podłączyć enkoder. a przy pomocy drugiego dokonać podłączenia sygnałów sterujących w złączu Main.
Jeżeli użyta zostanie płytka interfejsu enkodera. wówczas potrzebny będzie kompletny kabel Ethernet. Połączenia zaleca się wykonać kablami w oplocie. Długość kabla połączeniowego powinna zawierać się w przedziale od 1 mb do 100 mb. Kable o długości mniejszej niż 1 mb. oraz większej niż 100 mb mogą spowodować niepoprawną pracę. ze względu na złe dopasowanie impedancji.
Zaleca się odseparowanie kabli zasilających i silnikowych. od kabli enkoderów. Nie należy prowadzić ich blisko siebie. Powinny przecinać się jedynie pod kątem prostym.
Zasilanie części logicznej jest odseparowane galwanicznie od zasilania silnika. Oznacza to. że masy obu tych napięć nie mają wspólnego potencjału - nie są ze sobą połączone. Takie rozwiązanie ma na celu uniknięcia zakłóceń powstałych wskutek istnienia tzw. pętli masowych. Nie należy stosować tego samego źródła zasilania dla zasilania części logicznej. oraz silnika.
Aby uniknąć zakłóceń podczas komunikacji między komputerem. a sterownikami. należy używać separowanych źródeł zasilania dla części logicznej. oraz silników. Nie należy łączyć GND obu tych napięć razem. Przy podłączaniu sygnałów do złącza Main. oraz Encoder zaleca się użycie kabli w oplocie . Oplot kabla należy uziemić z jednej strony [np. w szafie sterowniczej].
Linia Error jest dwukierunkowa. Jeżeli będziemy traktować ją jako wyjście. wówczas pracuje jako wyjście typu otwarty kolektor. Podczas normalnej pracy na linii tej występuje stan wysoki [ wewnątrz sterownika jest ona podwieszona przy pomocy rezystora ~100kOhm do 5V.]. Takie rozwiązanie umożliwia równoległe połączenie kilku sterowników przy pomocy linii Error. tworząc w ten sposób wspólna linię Error.
Gdy na którymś ze sterowników zostanie zasygnalizowany stan awarii przez wymuszenie stanu niskiego na linii Error. wówczas wszystkie połączone linie zmienią swój stan na niski. wymuszając w ten sposób zatrzymanie pracy sterowników. Wspólna linia Error może również posłużyć do "poinformowania" programu sterującego [komputer. sterownik PLC] o wystąpieniu błędu. W tym celu należy wykorzystać zewnętrzny optoizolator. który możemy połączyć tak jak to zostało pokazane na rysunku 5.
Przy pomocy przycisku. lub tranzystora NPN. włączonych tak jak to pokazano na rys.5 możemy wymusić zatrzymanie pracy sterowników z zewnątrz [ ręcznie. lub z programu sterującego]. Należy zwrócić uwagę na pobierany prąd z linii Error [ nie należy jej przeciążać ].
Do linii tej może być dołączany jedynie potencjał GND napięcia zasilania logiki sterownika. Uwaga!! Maksymalny ciągły prąd jakim możemy obciążyć linię Error wynosi 10mA. Przeciążenie linii grozi trwałym uszkodzeniem sterownika!! Podłączenie linii ERROR 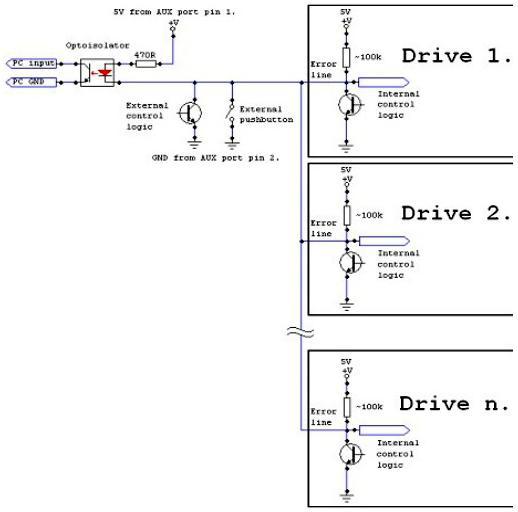 Linia Reset pracuje w standardzie TTL. Podczas normalnej pracy na linii tej występuje 5V [ w odniesieniu do sygnału GND napięcia zasilania logiki]. Linia ta jest wewnątrz sterownika podwieszona przy pomocy rezystora ~100kOhm. Funkcja reset zostanie uaktywniona jeżeli na linii wymusimy stan niski.
Linia Reset pracuje w standardzie TTL. Podczas normalnej pracy na linii tej występuje 5V [ w odniesieniu do sygnału GND napięcia zasilania logiki]. Linia ta jest wewnątrz sterownika podwieszona przy pomocy rezystora ~100kOhm. Funkcja reset zostanie uaktywniona jeżeli na linii wymusimy stan niski.
Jak zostało wspomniane w poprzednim rozdziale. linia Error jest wyjściem typu otwarty kolektor. Możemy łączyć równolegle kilka sterowników przy pomocy tej linii. Linia Reset jest wejściem. które również możemy łączyć równolegle z innymi sterownikami. Możliwe jest również łączenie linii Error i Reset w obrębie jednego sterownika. lub grupy sterowników. Otrzymamy w ten sposób wspólną linię error/reset. Jeżeli na wspólnej linii error/reset wymusimy z zewnątrz stan niski GND. wówczas sterownik zachowa się tak jakby była wyzwolona linia Reset i sterownik zatrzyma pracę.
Gdy przestaniemy wymuszać GND na wspólnej linii error/reset. sterownik automatycznie się zresetuje i wznowi pracę. Natomiast. gdy na którymś z sterowników połączonych w wspólną linię error/reset wystąpi błąd wewnętrzny. wówczas na wspólnej linii zostanie wymuszony stan niski. co spowoduje zatrzymanie pracy sterowników.
Oznacza to. że na wspólnej linii Reset również jest stan niski. co spowoduje zresetowanie pracy wszystkich połączonych sterowników - w tym tego z błędem. Mamy tu do czynienia z automatycznym resetem. podczas którego na wspólnej linii generowany jest impuls trwający ok. 300msek. który to można wykorzystać do wysterowania zewnętrznej logiki sterującej.
Przy takim połączeniu nie jest wymagany zewnętrzny przycisk do wykonania resetu sterowników w przypadku wystąpienia błędu. Należy pamiętać o tym. że wznowienie pracy jest możliwe jedynie po usunięciu przyczyny błędu. Ocenę potrzeby stosowania tego typu połączenia pozostawia się dla użytkownika. Jest to alternatywa dla ręcznego resetowania sterowników.
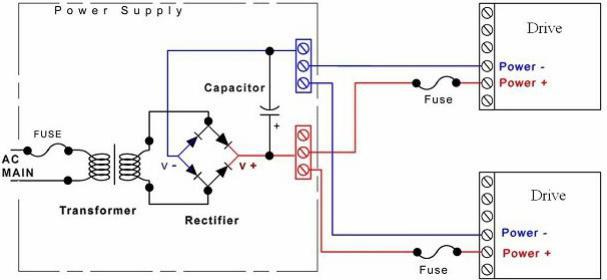
Sterowniki serii DG2S wymaga dwóch źródeł zasilania dla poprawnej pracy. Jedno dla zasilania części logicznej. drugie dla zasilania silnika. Typowo dla zasilania logiki możemy użyć stabilizowane napięcie 12V DC. Dla zasilania silnika najlepiej nadaje się niestabilizowane napięcie prądu stałego. Układ zasilania został przedstawiony na rysunku 5. Powinien składać się on z transformatora. mostka prostowniczego. oraz pojemności filtrującej. Moc zasilacza powinna być dobrana do zasilanych silników. Napięcie zasilania powinno być 5-10% wyższe od napięcia znamionowego silnika.
Wydajność prądowa powinna zaspokoić przynajmniej prąd znamionowy silnika. lub sumaryczny prąd silników. jeżeli jest ich więcej. Przy doborze pojemności filtrujących należy pamiętać. aby stosować kondensatory na odpowiednie napięcie. Przy wyborze wartości pojemności możemy stosować następującą zasadę: w przypadku napięcia zasilania mniejszego niż 80V stosujemy 1000uF na każdy 1A prądu. Natomiast przy napięciu powyżej 80V stosujemy 2000uF na 1A.
Nie zaleca się stosowania zasilaczy impulsowych dla zasilania sterowników. Zasilacze tego typu nie są przygotowane do odbioru zwrotu energii od odbiornika. Zastosowanie takiego połączenia może doprowadzić do uszkodzenia sterownika. i/lub zasilacza.